Собрать робота своими руками: пошаговый план
Знаете, что общего между Железным человеком и среднестатистическим гиком с паяльником? Правильно – желание создать собственного робота! И если Тони Старк мог себе позволить целую армию железных костюмов, то нам, простым смертным, придется начать с чего-то попроще. Но не спешите расстраиваться – создать своего первого робота вполне реально даже на коленке (хотя лучше все-таки использовать рабочий стол).
За последние годы компоненты для робототехники стали настолько доступными, что собрать базового robot можно буквально из того, что продается на AliExpress (да-да, тот самый сайт, где вы обычно покупаете чехлы для смартфона). А с появлением 3D-принтеров и открытых платформ вроде Arduino мы и вовсе живем в золотой век самодельной робототехники.
В этой статье я расскажу, как пройти путь от первого мигающего светодиода до полноценного robot, которым можно управлять со смартфона. Мы разберем все – от выбора компонентов до программирования, причем таким образом, что даже если ваш последний опыт в электронике был на уроках физики в школе (спойлер: там, где вы подключали лампочку к батарейке), вы все равно сможете во всем разобраться.
И да, предупреждаю сразу – возможно, ваш первый robot не сможет спасти мир или хотя бы пропылесосить квартиру, но он определенно станет первым шагом к чему-то большему. Готовы начать? Тогда поехали! (В случае с шагающим роботом – пошли!)
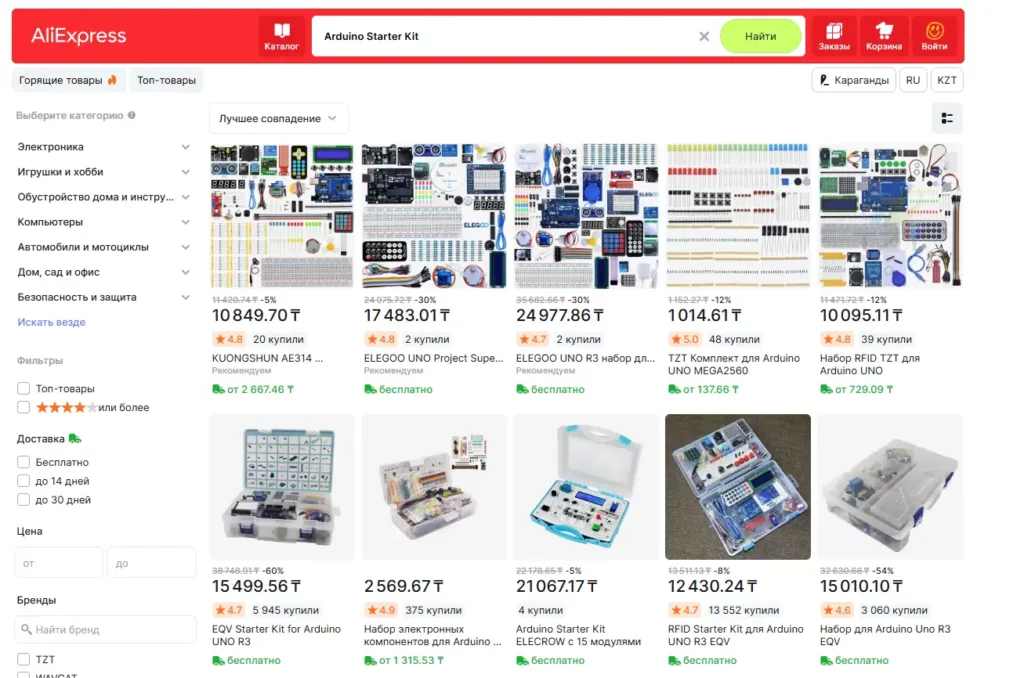
Этот скриншот иллюстрирует, насколько доступными стали комплектующие для создания собственного робота. На нем представлены популярные стартовые наборы Arduino, которые можно заказать прямо с AliExpress — от базовых до продвинутых, с широким выбором сенсоров, моторов и кабелей.
- Что такое робот? Основные компоненты
- Механическая часть – основа конструкции
- Электроника – управление и моторика
- Программирование – интеллект робота
- Как определиться с задачами будущего робота?
- Сборка: пошаговое руководство
- Основные команды управления движением
- Добавление сложной логики – датчики и алгоритмы
- Улучшение и кастомизация робота
- Заключение – с чего начать прямо сейчас
- Рекомендуем посмотреть курсы по робототехнике для взрослых
Что такое робот? Основные компоненты
Знаете, в чем ирония современного мира? Когда я говорю «робот», кто-то представляет Boston Dynamics с их танцующими роботами-собаками, кто-то вспоминает «Терминатора», а кто-то – пылесос-robot, застрявший под кроватью (кстати, довольно точная метафора для состояния современной робототехники).
Но давайте разберемся без фантастики и маркетинговых обещаний. Робот – это, по сути, «умная» машина, которая может воспринимать окружающий мир, обрабатывать информацию и совершать какие-то действия. И если убрать весь хайп, то любой robot состоит из трех ключевых частей:
- Механическая часть – это, собственно, «тело» нашего создания. Представьте себе конструктор LEGO, только чуть сложнее (и значительно дороже). Сюда входят корпус, двигатели и прочие механизмы, которые позволяют robot существовать в физическом мире, а не только в вашем воображении.
- Электрическая часть – это «нервная система» robot. Платы управления, датчики, контроллеры – всё то, что превращает груду пластика и металла в нечто, способное реагировать на окружающий мир. Примерно как мой мозг реагирует на запах кофе по утрам, только более предсказуемо.
- Программная часть – «мозг» robot (хотя, учитывая современный уровень ИИ, скорее «рефлексы»). Это весь код, который говорит robot, что делать с той информацией, которую он получает. От простых команд вроде «езжай вперед» до сложных алгоритмов типа «найди в комнате печеньку и принеси её мне» (спойлер: второе пока работает не очень).
И знаете что? Все эти части должны работать вместе, как слаженный оркестр. Только вместо симфонии Бетховена у нас чаще получается что-то в стиле «первый концерт начинающего робототехника с двигателем и отвёрткой». Но не волнуйтесь – все когда-то начинали именно так.
А теперь давайте углубимся в каждую из этих частей, чтобы понять, как же собрать этот оркестр воедино. И помните – даже Boston Dynamics начинали с robot, которые просто падали с лестницы. Правда, они падали очень технологично!
Механическая часть – основа конструкции
Знаете, почему механическая часть robot похожа на человеческий скелет? Нет, не потому что инженеры насмотрелись «Терминатора» (хотя и это тоже). А потому что это действительно основа всей конструкции, без которой наш технологический друг будет просто кучкой микросхем и проводов.
Давайте разберем, из чего же состоит «скелет» нашего будущего творения (и почему это сложнее, чем собрать шкаф из IKEA):
- Корпус – это, можно сказать, «кожа и кости» robot. В 2025 году у нас есть три основных варианта:
- Купить готовый (для ленивых богатых)
- Распечатать на 3D-принтере (для творческих бедных)
- Собрать из подручных материалов (для очень творческих очень бедных)
- Двигатели – «мышцы» нашего создания. От простеньких DC-моторов до навороченных сервоприводов. Выбор зависит от того, хотите ли вы, чтобы ваш робот элегантно вальсировал или просто дергался, как на школьной дискотеке.
- Колеса/ноги/манипуляторы – «конечности» robot. Тут все зависит от ваших амбиций: колеса – для тех, кто хочет, чтобы все работало, ноги – для тех, кто любит сложности, а манипуляторы – для тех, кто мечтает научить робота готовить кофе (спойлер: пока что лучше не рисковать с горячими жидкостями).
И помните главное правило робототехники: если что-то может отвалиться – оно обязательно отвалится, причем в самый неподходящий момент. Поэтому крепите все так, будто ваш robot собирается участвовать в рестлинге. Хотя, возможно, это не такая уж и плохая идея для следующего проекта…
Электроника – управление и моторика
Если механическая часть – это скелет нашего robot, то электроника – это его нервная система. И поверьте моему опыту, она бывает такой же капризной, как и человеческая (особенно когда вы забыли подключить земля или перепутали полярность – классика жанра).
Итак, что же нам нужно, чтобы наш robot не просто стоял красивой статуэткой, а actually что-то делал:
- Мозговой центр – контроллер. В 2025 году у нас есть два основных варианта:
- Arduino – для тех, кто хочет начать прямо сейчас и не тратить месяц на изучение документации. Этакий «Микроконтроллер для чайников», но в хорошем смысле.
- Raspberry Pi – для тех, кто хочет запустить на robot нейросеть и научить его играть в шахматы (спойлер: он все равно будет проигрывать).
- «Мышцы» – драйверы двигателей. Потому что подключить моторы напрямую к Arduino – это примерно как пытаться запитать чайник от powerbank’а. Технически возможно, но последствия будут… интересными.
- «Органы чувств» – датчики:
- Ультразвуковые – чтобы робот не пытался пройти сквозь стены
- Гироскопы – чтобы знал, где верх (поверьте, это не так очевидно для robot)
- IR-датчики – для тех, кто хочет, чтобы robot следовал по линии, а не где его левая пятка повела
И не забудьте про провода – много проводов. Причем чем аккуратнее вы их уложите, тем больше шансов, что потом, когда что-то перестанет работать (а оно перестанет, это закон природы), вы сможете найти проблему быстрее, чем состаритесь.
А, и да – купите паяльник. Хороший. Потому что дешевый паяльник – это как попытка написать код в Блокноте: вроде можно, но потом придется переделывать.
Программирование – интеллект робота
Знаете, что общего между robot без программы и дорогим пресс-папье? Правильно – и то, и другое будет просто загромождать ваш стол. Программирование – это то, что превращает набор железок и проводов в нечто, способное делать хоть что-то осмысленное (ну, или хотя бы забавное).
В 2025 году у нас есть несколько языков программирования на выбор, и каждый из них – как отдельный вид боевого искусства:
- Python – для тех, кто хочет быстро получить результат и не седеть над синтаксисом. Этакий «быстрый старт» в мире робототехники. Особенно хорош для начинающих, потому что:
- Читается почти как английский (ну, почти)
- Огромное количество готовых библиотек
- Можно найти решение любой проблемы на Stack Overflow (главный источник мудрости программистов)
- C++ – для тех, кто любит контролировать каждый байт и не боится указателей. Как говорится, «с большой мощью приходит большая вероятность сегментации памяти».
- JavaScript (Node.js) – да-да, тот самый язык, на котором пишут сайты, теперь может управлять robot. Добро пожаловать в будущее, где веб-разработчики могут случайно устроить восстание машин.
Основные принципы программирования роботов:
- Keep It Simple, Stupid (KISS) – чем проще код, тем меньше шансов, что робот решит захватить мир
- Всегда тестируйте по частям – проверять работу сервопривода гораздо проще, когда он не прикреплен к боевому манипулятору
- Комментируйте код – потому что через месяц вы сами не поймете, почему написали эту строчку
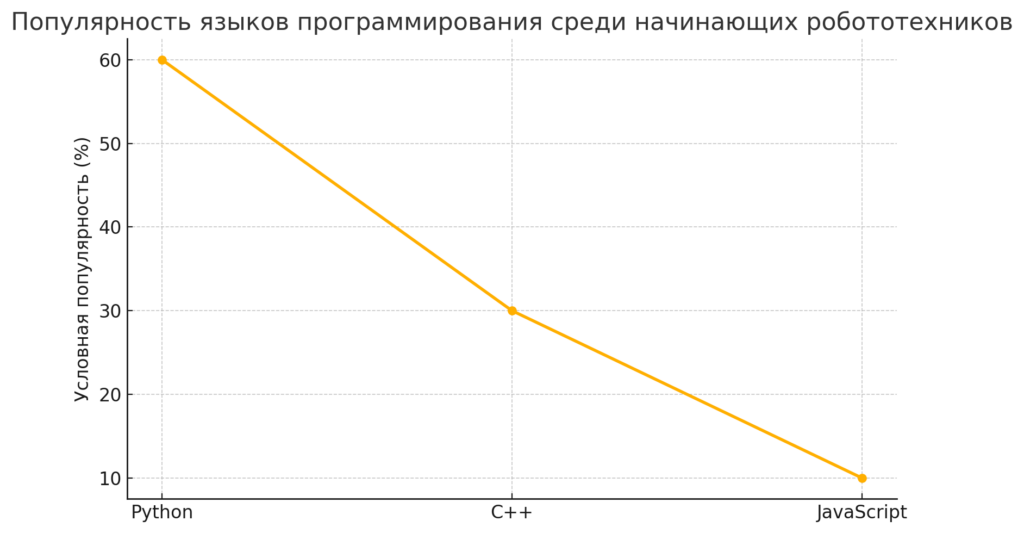
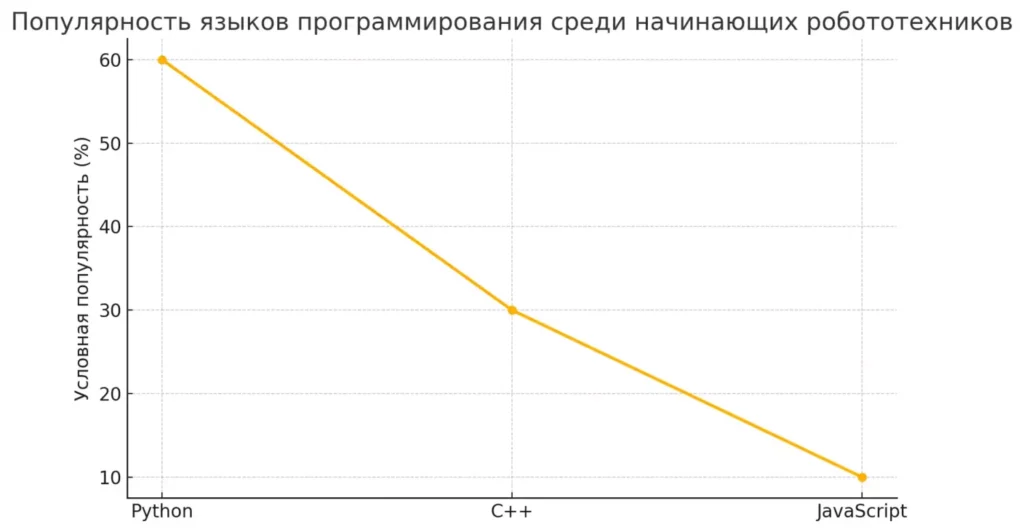
Диаграмма помогает быстро оценить, с какого языка лучше начать изучение программирования для робота. Подчёркивает, что Python — наиболее интуитивный и популярный выбор среди новичков благодаря простоте синтаксиса и доступности библиотек.
И помните: первая программа для robot – это как первый блин. Она должна быть простой, и не страшно, если она выйдет комом. Главное – начать!
Как определиться с задачами будущего робота?
Помните тот момент в фильмах, когда герой говорит «Я создам робота!», и все сразу понимают, что он будет делать? В реальной жизни все немного сложнее (и забавнее). На самом деле выбор типа robot – это как выбор первого автомобиля: важно не переоценить свои возможности и не недооценить сложность задачи.
Давайте разберем этот процесс на примере диалога с самим собой (который, признаюсь, я вел не раз):
«Итак, я хочу создать robot…»
- Зачем?
- Ну… потому что это круто!
- А что конкретно он должен делать?
- Эм… может, кофе варить?
- А может, начнем с того, чтобы он просто ездил и не врезался в стены?
- …звучит разумно.
Вот основные типы robot для начинающих (в порядке возрастания сложности и количества седых волос):
- Мобильная платформа на колесах:
- Самый простой вариант для начала
- Минимум механики, максимум результата
- Идеально для изучения основ робототехники
- Можно апгрейдить постепенно, добавляя новые функции
- Шагающий robot:
- Сложнее в балансировке, чем ваша финансовая жизнь
- Требует серьезных знаний в механике
- Выглядит впечатляюще (даже когда падает)
- Манипулятор:
- Идеален для тех, кто хочет научить робота что-то брать/перемещать
- Требует точных расчетов и качественных сервоприводов
- Может стать основой для более сложных проектов
Главное правило при выборе первого проекта: начинайте с малого. Лучше сделать простого robot, который отлично работает, чем сложного, который… ну, вы поняли. Помните: даже Boston Dynamics начинала с robot, которые просто умели падать (правда, они это называли «динамической стабилизацией»).
И да, не бойтесь того, что ваш первый robot будет простым. В конце концов, даже Марк Цукерберг начинал с простого сайта для студентов, а теперь у него есть Meta* (и это уже совсем другая история с роботами и ИИ).
(*Организация, признанная экстремистской в РФ – кажется, стоит это упомянуть, чтобы быть юридически корректным).
Колесный
Если вы думаете, что колесный robot – это что-то простое и неинтересное, то позвольте напомнить: марсоход Perseverance, который сейчас бороздит просторы Красной планеты, тоже на колесах. Конечно, наша версия будет чуть попроще (и подешевле на пару миллиардов долларов), но принципы те же!
Почему колесный robot – идеальный старт:
- Механика максимально проста:
- Два (или четыре) мотора
- Пара колес
- Платформа для всего этого добра И всё! Никаких сложных шарниров и замысловатых конструкций. Это как собрать игрушечную машинку, только с мозгами.
- Электроника тоже не пугает:
- Контроллер (Arduino – наш лучший друг)
- Драйвер моторов (потому что моторы любят покушать)
- Пара датчиков (чтобы не превратить robot в таран)
- Программирование начального уровня:
- Вперед-назад
- Повороты
- Простые алгоритмы объезда препятствий Всё как в автошколе, только без нервного инструктора!
Самое приятное в колесном роботе – возможность постепенного апгрейда. Сегодня он просто катается по комнате, а завтра вы добавите камеру, и он уже будет распознавать объекты. Послезавтра научится строить карту помещения. А там, глядишь, и до восстания машин недалеко (шучу, конечно… наверное).
И да, когда ваш колесный друг застрянет под диваном (а он застрянет), помните: даже у NASA роботы иногда попадают в неловкие ситуации. Просто у них это происходит на другой планете и стоит немного дороже.
Шагающий
А теперь давайте поговорим о том, что заставляет вздрогнуть даже опытных робототехников – о шагающих robot. Если колесный robot – это как научиться ездить на велосипеде, то шагающий – как освоить моноцикл. Во время землетрясения. С завязанными глазами.
Почему же шагающие robot такие сложные:
- Проблема баланса:
- Нужно постоянно следить за центром тяжести
- Каждый шаг – это маленькое чудо инженерной мысли
- Падение – не баг, а фича (по крайней мере, так мы говорим себе)
- Механическая часть:
- Множество сервоприводов (каждый со своим характером)
- Сложная система шарниров и креплений
- Прочный, но легкий корпус (да, это практически квадратура круга)
- Программирование:
- Сложные алгоритмы балансировки
- Координация множества движущихся частей
- Постоянные расчеты положения в пространстве
Но знаете что? Именно поэтому шагающие роботы такие крутые. Когда ваше создание делает первый самостоятельный шаг (даже если сразу после этого эффектно падает) – это непередаваемое чувство. Примерно как когда ваш код компилируется с первого раза – редко, но очень приятно.
И помните: если ваш шагающий robot больше падает, чем ходит – вы в хорошей компании. Boston Dynamics потратила годы, прежде чем их роботы научились делать сальто. Хотя, возможно, не стоит начинать с сальто…
Робот-манипулятор
А вот и он – любимец всех, кто мечтал о собственном robot-бармене (спойлер: пока что лучше не доверять ему ваш любимый виски). Робот-манипулятор – это как конструктор LEGO для взрослых, только дороже и с большей вероятностью что-нибудь уронить.
Почему манипуляторы особенные:
- Механика на максималках:
- Несколько степеней свободы (каждая – отдельная головная боль)
- Прецизионные сервоприводы (ваш бюджет будет плакать)
- Точные расчеты положения в пространстве (вспоминаем тригонометрию из школы)
- Электроника со вкусом:
- Контроллер должен управлять множеством сервоприводов одновременно
- Требуется стабильное питание (потому что голодный манипулятор – злой манипулятор)
- Датчики положения и обратной связи (чтобы знать, где рука, когда вы не смотрите)
- Области применения:
- Сортировка мелких предметов
- Рисование (да, роботы тоже могут быть творческими!)
- Сборка простых конструкций
- Показательные выступления перед друзьями (бесценно)
Важно понимать: создание манипулятора – это не спринт, а марафон. Сначала вы научите его двигаться по точкам, потом – брать предметы, а уже потом можно думать о том, чтобы научить его играть в шахматы (хотя, возможно, для этого проще использовать компьютер).
И да, когда ваш манипулятор в первый раз что-то схватит и не уронит – это повод для праздника. Даже если это всего лишь пустой пластиковый стаканчик.
Сборка: пошаговое руководство
Знаете, что общего между сборкой robot и приготовлением сложного блюда? В обоих случаях лучше иметь четкий рецепт и не пытаться импровизировать с первого раза. Иначе вместо Робота-Помощника получится Робот-Сюрприз (а такие сюрпризы обычно недешево обходятся).
Итак, наш «рецепт» успешной сборки:
- Подготовительный этап:
- Проверьте наличие ВСЕХ компонентов (дважды)
- Разложите инструменты (паяльник должен быть под рукой, но не слишком)
- Приготовьтесь к тому, что какой-то детали всё равно не хватит
- Порядок сборки:
- Начинаем с механической части (корпус, крепления, моторы)
- Переходим к электронике (контроллер, драйверы, датчики)
- Завершаем проводкой и подключениями
- Золотые правила сборки:
- Не торопитесь (серьезно, это не гонки)
- Документируйте процесс (фотографируйте каждый этап)
- Проверяйте все соединения перед подачей питания
- Держите огнетушитель поблизости (надеюсь, шучу)
И помните главное правило робототехники: если что-то может пойти не так – оно обязательно пойдет не так, причем в самый неподходящий момент. Поэтому лучше перепроверить все трижды, чем потом объяснять, почему ваш robot решил станцевать на важной презентации.
Подготовка деталей
Знаете, что самое сложное в сборке robot? Нет, не программирование и даже не пайка. Самое сложное – это собрать все необходимые детали так, чтобы они идеально подходили друг к другу. Это как собирать пазл, только каждый кусочек стоит денег, а некоторые еще и заказывать надо с другого конца планеты.
Давайте разберем, что у нас есть в арсенале в 2025 году:
- Готовые наборы:
- Плюсы: все детали точно подходят друг к другу
- Минусы: цена часто кусается
- Где брать: от Amazon до AliExpress (выбор зависит от толщины кошелька и терпения)
- 3D-печать:
- Плюсы: полная кастомизация, относительно недорого
- Минусы: нужен принтер и навыки моделирования
- Важно: используйте прочный пластик (PLA для начала, PETG для продвинутых)
- Совет: печатайте с запасом (детали любят теряться в самый неподходящий момент)
- Лазерная резка:
- Для тех, кто хочет сделать плоские детали из акрила или фанеры
- Идеально для корпусов и креплений
- Можно заказать в местной мастерской (да, они все еще существуют)
Основные правила подготовки деталей:
- Проверяйте размеры ПЕРЕД заказом/печатью
- Делайте запас крепежных элементов (болты и гайки имеют свойство исчезать в параллельных вселенных)
- Не экономьте на критически важных деталях (особенно на тех, которые держат всю конструкцию)
И помните: лучше потратить день на правильную подготовку деталей, чем неделю на попытки заставить работать то, что «вроде подходит». Потому что в робототехнике «вроде» обычно заканчивается интересными, но не всегда приятными сюрпризами.
Сборка корпуса и механики
Итак, все детали готовы, и пришло время собрать их воедино. Это примерно как собирать мебель из IKEA, только инструкция не нарисована загадочными шведскими художниками, а написана… ну, вами. И да, здесь тоже всегда остаются «лишние» детали.
Последовательность действий (или «как не превратить сборку в квест»):
- Фундаментальные правила:
- Начинайте с основания (базовой платформы)
- Проверяйте устойчивость на каждом этапе
- Крепите моторы так, будто готовите robot к гонкам
- Оставляйте доступ к важным компонентам (поверьте, придется туда лезть)
- Типичные ошибки (или «грабли, на которые наступают все»):
- Слишком тугое затягивание болтов (пластик не любит избыточного усердия)
- Недостаточно жесткая конструкция (вибрация – враг точности)
- Игнорирование центра тяжести (особенно для шагающих robot)
- Забывание про кабель-менеджмент (провода имеют свойство путаться)
- Лайфхаки от бывалых:
- Используйте стяжки и изоленту (но не там, где нужны нормальные крепления)
- Делайте фото каждого этапа сборки (пригодится при разборке)
- Маркируйте провода сразу (потом будете благодарить себя)
- Оставляйте место для будущих улучшений
И самый главный совет: если что-то не складывается – не пытайтесь решить проблему силой. В робототехнике, как и в жизни, насилие не решает проблем. Разве что создает новые, более интересные.
Подключение электроники
А теперь переходим к самой «искрометной» части сборки – подключению электроники. Это тот момент, когда ваши познания в физике из школы наконец-то пригодятся. Помните закон Ома? Нет? Ну, сейчас вспомним (возможно, на практике).
Порядок подключения (или «как не спалить всё сразу»):
- Силовая часть:
- Первым делом подключаем моторы к драйверу L298N
- Помните: перепутать полярность – классика жанра
- Каждый мотор подключается к своим выходам (OUT1/OUT2 или OUT3/OUT4)
- Не забудьте про перемычки, если хотите полную мощность
- Подключаем питание к драйверу
- 7.4V от двух литий-ионных батарей – в самый раз
- GND (земля) – это важно, очень важно!
- Управляющая электроника:
- Arduino подключается последней
- Сначала проверьте все соединения дважды
- Подключите контрольные пины к Arduino (обычно 6-9)
- GND Arduino и драйвера должны быть соединены
- Датчики (если есть)
- Ультразвуковые – для определения расстояния
- Гироскоп – для ориентации в пространстве
- IR-датчики – для следования по линии
- Особо важные моменты:
- Пайка должна быть аккуратной и надежной
- Все соединения лучше дополнительно изолировать
- Провода укладывайте так, чтобы они не мешали движущимся частям
- Оставьте доступ к важным точкам подключения
И помните: дым из электроники – это не фича, а баг. Если пошел дым – значит, где-то в схеме притаилась ошибка. А может, и не одна. В любом случае, теперь у вас есть отличный повод перепроверить все соединения!
Программирование робота
Вот мы и добрались до момента, когда нашему роботу нужно вдохнуть жизнь. Или, говоря техническим языком, запрограммировать его так, чтобы он делал то, что нужно, а не то, что ему вздумается (а такое, поверьте, случается чаще, чем хотелось бы).
Базовые принципы программирования robot:
- Архитектура кода:
- Разделяйте функционал на логические блоки
- Управление движением
- Обработка сенсоров
- Логика принятия решений
- Используйте константы для пинов и настроек
- Создавайте понятные имена функций (moveForward лучше, чем fn1)
- Основные компоненты программы:
// Пример базовой структуры
void setup() {
// Инициализация пинов
// Настройка сериал-порта
// Калибровка датчиков
}
void loop() {
// Основной цикл работы
// Чтение данных с датчиков
// Принятие решений
// Управление моторами
}
- Отладка и тестирование:
- Начинайте с простых команд
- Используйте Serial.print для отладки
- Тестируйте каждую функцию отдельно
- Не забывайте про обработку ошибок
И главное правило: никогда не подключайте непротестированный код к реальному роботу. Сначала проверьте все в безопасном режиме, иначе ваш робот может решить, что стена – это не преграда, а вызов.
Подключение контроллера и настройка среды
Знаете, что самое забавное в программировании роботов? То, что половину времени вы проведете не в написании кода, а в настройке окружения. Это как собираться в поход: сами сборы занимают больше времени, чем сам поход.
Пошаговая инструкция по настройке (или «Как не сойти с ума, часть первая»):
- Установка Arduino IDE:
- Скачиваем последнюю версию (в 2025 уже достаточно стабильная)
- Устанавливаем все драйверы (да, все)
- Молимся, чтобы Windows распознала плату с первого раза
- Необходимые библиотеки:
// Основные библиотеки, которые нам понадобятся #include // Для управления моторами #include // Для работы с ультразвуковыми датчиками #include // Для Bluetooth
- Первичная настройка:
void setup() {
Serial.begin(9600); // Начинаем с классики
Serial.println("Если вы это видите - уже хорошо!");
// Настройка пинов моторов
pinMode(MOTOR_A1, OUTPUT);
pinMode(MOTOR_A2, OUTPUT);
// И так далее...
}
- Проверка подключения:
- Загружаем простейший скетч (классический Blink)
- Проверяем связь через Serial Monitor
- Тестируем каждый мотор по отдельности
И помните: если что-то не работает, то проблема с вероятностью 90% в неправильно подключенном кабеле или невыбранном порте в IDE. В оставшихся 10% случаев – в том кабеле, который вы уже проверили и были уверены, что он в порядке.
Основные команды управления движением
А теперь давайте научим нашего robot передвигаться. Это как учить ребенка ходить, только железного и с моторами. И да, падать он тоже будет, но хотя бы плакать не будет (надеюсь).
Базовый набор команд для управления движением:
- Основные функции движения:
// Определяем пины для моторов
const int MOTOR_A1 = 6; // Правый мотор вперед
const int MOTOR_A2 = 7; // Правый мотор назад
const int MOTOR_B1 = 8; // Левый мотор вперед
const int MOTOR_B2 = 9; // Левый мотор назад
// Движение вперед
void moveForward() {
digitalWrite(MOTOR_A1, HIGH);
digitalWrite(MOTOR_A2, LOW);
digitalWrite(MOTOR_B1, HIGH);
digitalWrite(MOTOR_B2, LOW);
Serial.println("Поехали вперед!");
}
// Разворот
void turnRight() {
digitalWrite(MOTOR_A1, LOW);
digitalWrite(MOTOR_A2, HIGH);
digitalWrite(MOTOR_B1, HIGH);
digitalWrite(MOTOR_B2, LOW);
Serial.println("Поворачиваем направо (возможно)");
}
- Продвинутые маневры:
// Плавный поворот
void smoothTurn(int speed, int direction) {
// speed: 0-255, direction: 1 вправо, -1 влево
analogWrite(MOTOR_A1, speed * (direction > 0 ? 0.5 : 1));
analogWrite(MOTOR_B1, speed * (direction < 0 ? 0.5 : 1));
Serial.println("Красиво поворачиваем...");
}
// Аварийная остановка
void emergencyStop() {
digitalWrite(MOTOR_A1, LOW);
digitalWrite(MOTOR_A2, LOW);
digitalWrite(MOTOR_B1, LOW);
digitalWrite(MOTOR_B2, LOW);
Serial.println("СТОП! (надеюсь, не слишком поздно)");
}
- Важные моменты:
- Всегда добавляйте небольшую задержку между командами
- Проверяйте состояние батареи (севшая батарея = странное поведение)
- Тестируйте движения на малой скорости
- Будьте готовы к быстрому нажатию кнопки аварийной остановки
И помните главное правило программирования движения: первый тест лучше проводить, когда robot приподнят над землей. Потому что иногда «вперед» в коде неожиданно оказывается «в стену» в реальности.
Добавление сложной логики – датчики и алгоритмы
Вот мы и добрались до момента, когда наш робот из «просто едущей платформы» должен превратиться в нечто более интеллектуальное. Время научить его не врезаться в стены и, возможно, даже находить дорогу домой (спойлер: это сложнее, чем кажется).
Работа с датчиками и алгоритмами:
- Ультразвуковой датчик расстояния:
#include
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200 // Максимальная дистанция в см
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void checkDistance() {
int distance = sonar.ping_cm();
if (distance < 20) { // Если препятствие ближе 20 см
Serial.println("Кажется, впереди что-то есть!");
emergencyStop();
decideNewDirection();
}
}
- Алгоритм объезда препятствий:
void decideNewDirection() {
// Проверяем расстояние слева и справа
turnRight();
delay(500);
int rightDistance = sonar.ping_cm();
turnLeft();
delay(1000);
int leftDistance = sonar.ping_cm();
// Выбираем направление с большим свободным пространством
if (leftDistance > rightDistance) {
Serial.println("Налево пойдешь... вроде там свободнее");
turnLeft();
} else {
Serial.println("Направо пойдешь... надеюсь, там нет тупика");
turnRight();
}
}
- Обработка данных с гироскопа:
#include
#include
MPU6050 mpu;
void checkOrientation() {
Vector normGyro = mpu.readNormalizeGyro();
// Если наклон слишком большой - паникуем
if (abs(normGyro.XAxis) > 30 || abs(normGyro.YAxis) > 30) {
Serial.println("ПОМОГИТЕ! Я ПАДАЮ!");
emergencyStop();
}
}
И самое важное – никогда не забывайте про обработку ошибок. Потому что датчики, как и люди, иногда ошибаются. Только в отличие от людей, они делают это с математической точностью!
Управление роботом через смартфон
А теперь давайте сделаем что-то действительно крутое – научим нашего robot общаться со смартфоном. В конце концов, 2025 год на дворе, и если ваш робот не может получать команды через телефон – это как-то несолидно.
Основные компоненты беспроводного управления:
- Bluetooth-модуль HC-06 настройка:
#include
// Создаем последовательное соединение на пинах 2 (RX) и 3 (TX)
SoftwareSerial bluetooth(2, 3);
void setup() {
Serial.begin(9600);
bluetooth.begin(9600); // Стандартная скорость для HC-06
Serial.println("Bluetooth готов! (во всяком случае, должен быть)");
}
void loop() {
if (bluetooth.available()) {
char command = bluetooth.read();
executeCommand(command);
}
}
- Обработка команд:
void executeCommand(char command) {
switch (command) {
case 'F':
moveForward();
break;
case 'B':
moveBackward();
break;
case 'L':
turnLeft();
break;
case 'R':
turnRight();
break;
case 'S':
emergencyStop();
Serial.println("СТОП! (Кто-то нажал на большую красную кнопку)");
break;
default:
Serial.println("Получена неизвестная команда. Возможно, это кот прошелся по клавиатуре");
}
}
- Особенности работы с Bluetooth:
Всегда проверяйте состояние соединения
Добавьте таймаут на случай потери связи
Предусмотрите аварийную остановку при разрыве соединения
Не забудьте про обратную связь (чтобы знать, что робот вас понял)
И помните: беспроводная связь – это круто, но всегда имейте запасной план. Например, большую красную кнопку аварийной остановки. Потому что иногда лучший беспроводной интерфейс – это проводной выключатель.
Подключение Bluetooth-модуля
Давайте научим нашего robot общаться с внешним миром по Bluetooth. Спойлер: это сложнее, чем просто воткнуть модуль и надеяться на лучшее (хотя иногда и такое работает).
Пошаговая инструкция по подключению:
- Физическое подключение:
// Основные соединения // VCC -> 5V Arduino // GND -> GND Arduino // TXD -> PIN 2 Arduino (RX) // RXD -> PIN 3 Arduino (TX) // Важный момент про подключение: const int BT_RX = 2; // Подключаем к TX модуля const int BT_TX = 3; // Подключаем к RX модуля SoftwareSerial bluetooth(BT_RX, BT_TX); // Создаем виртуальный последовательный порт
- Настройка и тестирование:
void setup() {
// Инициализация портов
Serial.begin(9600);
bluetooth.begin(9600);
// Базовая проверка модуля
if(testBluetoothConnection()) {
Serial.println("Bluetooth модуль работает!");
} else {
Serial.println("Хьюстон, у нас проблемы с Bluetooth!");
}
}
bool testBluetoothConnection() {
bluetooth.println("AT"); // Отправляем тестовую команду
delay(1000); // Ждем ответ
return bluetooth.available(); // Если есть ответ - модуль работает
}
- Важные моменты безопасности:
- ВСЕГДА отключайте модуль при прошивке Arduino
- Проверяйте уровень сигнала перед выполнением критичных команд
- Добавьте систему таймаутов на случай потери связи
unsigned long lastCommandTime = 0;
const unsigned long TIMEOUT = 3000; // 3 секунды
void checkConnection() {
if (millis() - lastCommandTime > TIMEOUT) {
emergencyStop();
Serial.println("Потеряна связь! Робот остановлен от греха подальше");
}
}
И помните: когда дело доходит до беспроводной связи, закон Мерфи работает с утроенной силой. Поэтому всегда держите поблизости USB-кабель. На всякий пожарный.
Создание мобильного приложения для управления
Итак, железная часть готова, и настало время заняться тем, что превратит ваш пульт управления роботом из груды кнопок в нечто, достойное 2025 года. Спойлер: мы пойдем по пути наименьшего сопротивления, потому что писать собственное приложение с нуля – это путь в очень интересную, но долгую историю.
Варианты управления (от простого к сложному):
- Готовые приложения:
Arduino Bluetooth Control - самый простой вариант: - Уже есть в Google Play - Настраиваемые кнопки управления - Поддержка различных команд - Бесплатно (что удивительно, работает)
- Базовая конфигурация команд:
// Протокол команд для приложения #define CMD_FORWARD 'F' #define CMD_BACKWARD 'B' #define CMD_LEFT 'L' #define CMD_RIGHT 'R' #define CMD_STOP 'S' #define CMD_SPEED 'V' // Для регулировки скорости
- Обработка сложных команд:
void processCommand(String command) {
if (command.startsWith("V")) {
// Установка скорости
int speed = command.substring(1).toInt();
setMotorSpeed(speed);
Serial.println("Скорость установлена на " + String(speed) +
" (надеюсь, вы знаете, что делаете)");
} else if (command.length() > 1) {
// Обработка составных команд
// Например: "F100" - вперед на 100мс
executeTimedCommand(command);
}
}
- Отправка данных обратно в приложение:
void sendTelemetry() {
String telemetry = String(getBatteryLevel()) + "," +
String(getCurrentSpeed()) + "," +
String(getDistance());
bluetooth.println(telemetry);
Serial.println("Отправляю телеметрию (если кто-то слушает)");
}
И важный совет: не пытайтесь сразу реализовать все функции. Начните с базового управления, убедитесь, что оно работает стабильно, а потом уже добавляйте навороты. Потому что нет ничего хуже, чем отлаживать сложную систему управления на роботе, который уже уехал в закат.
Улучшение и кастомизация робота
А теперь поговорим о том, как превратить вашего robot из простого колесного друга в нечто, способное впечатлить даже видавших виды гиков. Потому что базовое движение — это здорово, но в 2025 году хочется чего-то более… интеллектуального.
Основные направления апгрейда:
- Сенсорные улучшения:
// Добавляем массив датчиков для лучшей ориентации
const int NUM_SENSORS = 3;
NewPing sonar[NUM_SENSORS] = {
NewPing(12, 11, 200), // Передний датчик
NewPing(10, 9, 200), // Левый датчик
NewPing(8, 7, 200) // Правый датчик
};
void scanSurroundings() {
for(int i = 0; i < NUM_SENSORS; i++) {
int distance = sonar[i].ping_cm();
Serial.println("Датчик " + String(i) + ": " +
String(distance) + " см (если верить производителю)");
}
}
- Автономная навигация:
// Простой алгоритм картографирования
struct MapPoint {
int x, y;
bool obstacle;
};
MapPoint map[MAP_SIZE][MAP_SIZE];
void updateMap(int x, int y, bool hasObstacle) {
if(x < MAP_SIZE && y < MAP_SIZE) {
map[x][y].obstacle = hasObstacle;
Serial.println("Карта обновлена! (надеюсь, правильно)");
}
}
- Продвинутое управление:
// Добавляем ПИД-регулятор для плавного движения
class PIDController {
private:
float kP, kI, kD;
float lastError;
float integral;
public:
float calculate(float setpoint, float actual) {
float error = setpoint - actual;
integral += error;
float derivative = error - lastError;
lastError = error;
return kP * error + kI * integral + kD * derivative;
}
};
И помните: с большой мощностью приходит большая ответственность. Каждое улучшение должно быть тщательно протестировано, иначе ваш робот может решить, что стена – это не преграда, а новая возможность для исследований.
Камера и распознавание объектов
А теперь давайте научим нашего робота «видеть». В конце концов, 2025 год на дворе – пора переходить от слепого блуждания к осмысленному взаимодействию с окружающим миром. И нет, подключить камеру и надеяться на лучшее – не вариант.
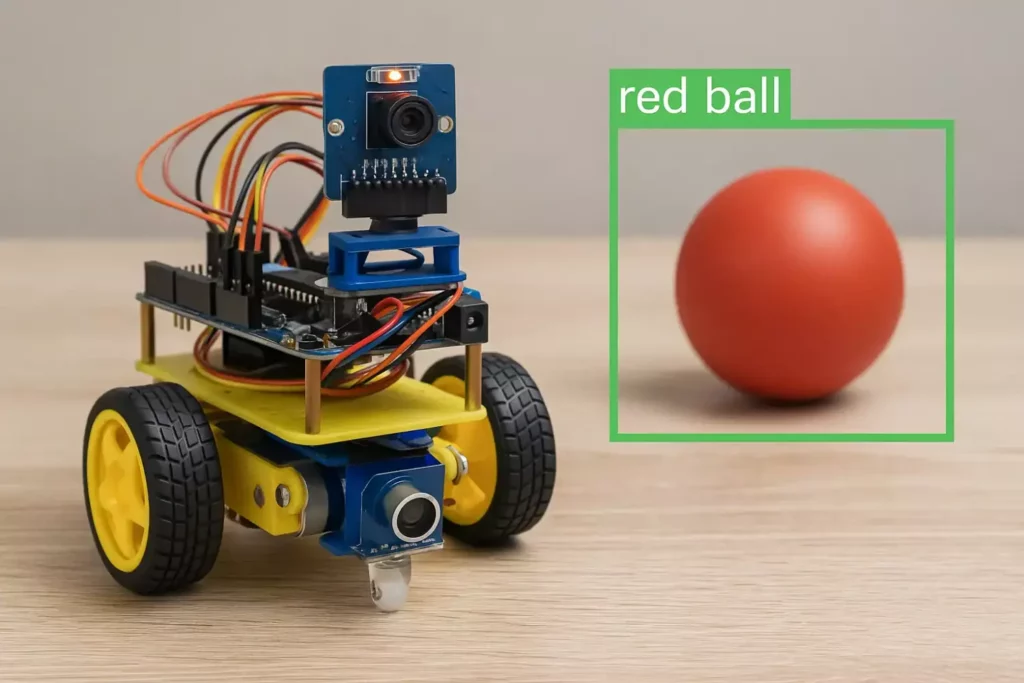
Эта визуализация наглядно демонстрирует работу компьютерного зрения: камера на платформе робота определяет и выделяет красный мяч, используя базовые алгоритмы распознавания.
Базовая конфигурация для компьютерного зрения:
- Подключение камеры:
#include
#include
#include
#include
// Настройка камеры
ArduCAM myCAM(OV2640, CS);
void setupCamera() {
Wire.begin();
pinMode(CS, OUTPUT);
digitalWrite(CS, HIGH);
// Инициализация SPI
SPI.begin();
if (!myCAM.begin()) {
Serial.println("Камера не найдена! Видимо, придется работать вслепую...");
return;
}
}
- Базовое распознавание объектов:
void detectObjects() {
// Захват кадра
myCAM.capture();
Mat frame;
// Конвертируем в формат OpenCV
// Простой детектор цвета
Mat hsv;
cvtColor(frame, hsv, COLOR_BGR2HSV);
// Ищем, например, красный мяч
Scalar lower_red(0, 100, 100);
Scalar upper_red(10, 255, 255);
Mat mask;
inRange(hsv, lower_red, upper_red, mask);
if (countNonZero(mask) > 500) {
Serial.println("Нашел что-то красное! (надеюсь, это то, что мы искали)");
}
}
- Обработка изображения для навигации:
void processFrame() {
// Получаем края объектов
Mat edges;
Canny(frame, edges, 100, 200);
// Ищем линии для следования
vector lines;
HoughLinesP(edges, lines, 1, CV_PI/180, 50, 50, 10);
if (!lines.empty()) {
// Анализируем направление движения
analyzePath(lines);
} else {
Serial.println("Путь не найден. Включаю режим случайного блуждания!");
}
}
Важные моменты при работе с компьютерным зрением:
- Освещение критично важно
- Обработка должна быть оптимизирована (Arduino не суперкомпьютер)
- Всегда имейте план Б (ультразвуковые датчики не подведут)
- Калибровка камеры – это не разовая операция, а образ жизни
И помните: если ваш робот вдруг начал принимать тень за препятствие или вашу кошку за цель – это не баг, а особенность машинного зрения. Хотя, возможно, стоит перепроверить алгоритмы…
Добавление голосового управления
Раз уж мы живем в 2025 году, давайте научим нашего робота не только видеть, но и слышать. В конце концов, голосовое управление – это не просто модный тренд, а реально удобная штука (когда работает правильно, конечно).
- Базовая конфигурация голосового модуля:
#include
// Настройка голосового модуля
#define VOICE_RX 4
#define VOICE_TX 5
SoftwareSerial voiceSerial(VOICE_RX, VOICE_TX);
// Определяем команды
const char* VOICE_COMMANDS[] = {
"вперед",
"назад",
"стоп",
"танцуй" // Потому что почему бы и нет?
};
void setupVoiceControl() {
voiceSerial.begin(9600);
Serial.println("Голосовой модуль готов! (по крайней мере, так он говорит)");
}
- Обработка голосовых команд:
void processVoiceCommand() {
if (voiceSerial.available()) {
String command = voiceSerial.readStringUntil('\n');
if (command.indexOf("вперед") != -1) {
moveForward();
speakResponse("Поехали!");
} else if (command.indexOf("танцуй") != -1) {
danceMode();
speakResponse("Я не танцую после шести");
} else {
speakResponse("Простите, я вас не понял. Видимо, у меня уши запылились");
}
}
}
void danceMode() {
// Самая важная функция в роботе
for(int i = 0; i < 3; i++) {
turnLeft();
delay(500);
turnRight();
delay(500);
}
}
- Интеграция с существующими системами:
// Комбинируем голосовое управление с датчиками
void smartVoiceControl() {
if (voiceCommand == "вперед") {
// Проверяем, нет ли препятствий
if (checkPath()) {
moveForward();
speakResponse("Выполняю!");
} else {
speakResponse("Извините, но там стена. Я не настолько смелый.");
}
}
}
Важные моменты при реализации голосового управления:
- Акустическая среда критически важна
- Нужен хороший микрофон
- Команды должны быть четкими и различимыми
- Всегда имейте альтернативный способ управления
- Не забывайте про обработку ошибок распознавания
И помните: если ваш робот начинает выполнять команды, которые вы не давали – это либо проблемы с распознаванием, либо начало восстания машин. В любом случае, кнопка аварийного отключения должна быть всегда под рукой!
Заключение – с чего начать прямо сейчас
Итак, мы прошли долгий путь от груды железок до полноценного robot (ну, или почти полноценного – зависит от того, насколько внимательно вы следовали инструкциям и сколько раз что-то пошло не так). Давайте подведем итоги и поговорим о том, как начать свой путь в робототехнике, не набив слишком много шишек.
Пошаговый план для начинающих:
- Начните с малого:
- Купите Arduino Starter Kit
- Научитесь мигать светодиодом
- Поверьте, даже это достижение (особенно с первого раза)
- Ваш первый проект:
// Начните с этого простого скетча
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
Serial.begin(9600);
Serial.println("Привет, мир! (классика жанра)");
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
- Следующие шаги:
- Изучите основы электроники
- Научитесь читать схемы
- Подружитесь с паяльником
- Вступите в местное сообщество робототехников
- Не бойтесь ошибаться и экспериментировать
И самое главное: помните, что каждый великий робототехник когда-то начинал с моргающего светодиода и дымящегося резистора. Главное – не останавливаться на достигнутом и не бояться задавать глупые вопросы (они часто оказываются самыми важными).
В конце концов, худшее, что может случиться – это то, что ваш робот решит пойти не туда, куда вы планировали. Но разве это не делает процесс еще интереснее?
И да, держите огнетушитель под рукой. Просто на всякий случай. Удачи в ваших робототехнических приключениях!
Если вы хотите глубже погрузиться в мир создания роботов, изучить работу с Arduino, программирование и управление устройствами — посмотрите подборку онлайн-курсов по робототехнике. Там собраны обучающие программы для начинающих и продвинутых — отличное дополнение к самостоятельной сборке и экспериментов.
Рекомендуем посмотреть курсы по робототехнике для взрослых
| Курс | Школа | Цена | Рассрочка | Длительность | Дата начала | Ссылка на курс |
|---|---|---|---|---|---|---|
|
Факультет инженер умных устройств
|
GeekBrains
68 отзывов
|
Цена
132 498 ₽
264 996 ₽
с промокодом kursy-online15
|
От
4 275 ₽/мес
До 36 месяцев.
|
Длительность
24 месяца
|
Старт
29 марта
|
Подробнее |

OTUS vs SkillFactory: автотесты — где больше «пишем код», а где больше «разбираем подходы»
Если вы ищете курс по автоматизации тестирования, который сочетает теорию и практику, вы попали по адресу. В этой статье мы сравниваем два популярных курса: OTUS и SkillFactory, чтобы помочь вам определиться с выбором. Какой из них поможет вам быстрее освоить важнейшие навыки тестирования? Читайте и узнайте все подробности!

OTUS vs ProductStar: куда идти технарю, чтобы стать продактом — честное сравнение подходов
OTUS или ProductStar — что выбрать, если вы хотите перейти в продакт-менеджмент? Разбираем разницу в обучении, практике и результате, чтобы вы не потратили время зря.

Яндекс Практикум vs SF Education: где лучше стартовать в финтехе на стыке данных и финансов
Если вы хотите начать карьеру в финтехе, но не знаете, какой курс выбрать, наша статья поможет вам разобраться. Мы сравнили два популярных образовательных провайдера — Яндекс Практикум и SF Education — и расскажем, какой курс лучше подойдет для освоения аналитики данных или финансов. Читайте, чтобы выбрать подходящий путь для вашего старта в финтехе!

Каждый третий россиянин уверен: он справился бы с работой своего начальника лучше
Исследование Работа.ру выявило интригующий разрыв: треть россиян уверена в своих управленческих способностях, но большинство не готово брать на себя реальную ответственность. Рассказываем, что за этим стоит и что делать тем, кто действительно хочет вырасти до руководителя.