Языки программирования для роботов: что выбрать?
В эпоху стремительного развития технологий роботы перестали быть элементом научной фантастики и все активнее входят в нашу повседневную жизнь. От промышленных манипуляторов, широко применяемых в производстве, до экспериментальных автономных систем доставки, проходящих испытания в отдельных городах, — роботизированные системы постепенно становятся важной частью современного мира. Однако за каждым движением робота стоит сложный программный код, который определяет его поведение и возможности.
В этой статье мы детально рассмотрим ключевые языки программирования, используемые в робототехнике, и разберемся, какие инструменты лучше подходят для различных задач — от простого управления движением до сложных систем машинного обучения. Независимо от того, планируете ли вы создавать промышленных роботов, разрабатывать системы автоматизации или экспериментировать с домашними проектами, понимание особенностей каждого языка программирования поможет сделать правильный выбор и избежать типичных ошибок при разработке.
Этот материал будет полезен как начинающим разработчикам, делающим первые шаги в робототехнике, так и опытным инженерам, желающим расширить свой технический арсенал. Давайте погрузимся в мир программирования роботов и разберем все нюансы этой увлекательной области.
- Что такое программирование роботов и зачем оно нужно?
- Ключевые факторы при выборе языка программирования для роботов
- Производительность
- Гибкость и модульность
- Простота изучения и разработки
- Экосистема и инструментарий
- Поддержка AI и ML
- Популярные языки программирования для робототехники
- Python – универсальный и удобный язык
- C++ – скорость и точность в управлении роботами
- Assembly — максимальный контроль над аппаратной частью
- Java – кроссплатформенность и гибкость
- MATLAB – расчёты и моделирование
- C# – интеграция с Microsoft и .NET
- LISP – для AI и интеллектуальных систем
- Фреймворки и среды разработки для программирования роботов
- ROS – ключевой инструмент для робототехники
- Arduino и Raspberry Pi – для прототипирования и обучения
- Какой язык выбрать для изучения: рекомендации по применению
- Примеры кода для работы с роботами
- Python: управление движением робота
- C++: работа с датчиками
- Заключение
- Рекомендуем посмотреть курсы по робототехнике для взрослых
Что такое программирование роботов и зачем оно нужно?
В современном понимании программирование роботов представляет собой нечто большее, чем просто написание кода. Это комплексный процесс создания интеллектуальных систем, способных взаимодействовать с окружающим миром и принимать решения на основе получаемых данных. По сути, мы создаем «мозг» робота, определяющий его поведение в различных ситуациях.
Важно понимать, что робототехника — это симбиоз программного и аппаратного обеспечения. Даже самая совершенная механическая система останется бесполезной без правильно написанных алгоритмов управления. И наоборот: великолепный код не сможет реализовать свой потенциал без соответствующей hardware-платформы.
Сегодня роботы находят применение в самых разных областях: от точечной сварки на автомобильных производствах до проведения сложнейших хирургических операций. В логистике автономные системы все чаще используются для оптимизации работы крупных складов, в передовых сельскохозяйственных предприятиях роботизированные системы начинают применяться для мониторинга посевов и точечного внесения удобрений, а в космической отрасли роботы играют важную роль в исследовании других планет. Каждая из этих задач требует специализированного программного обеспечения, учитывающего особенности конкретной области применения.
Ключевые факторы при выборе языка программирования для роботов
При выборе языка программирования необходимо учитывать целый комплекс факторов, каждый из которых может оказаться критичным для успеха проекта. Давайте рассмотрим наиболее важные из них.
Производительность
В робототехнике скорость выполнения кода часто играет решающую роль. Когда речь идет об управлении движением или обработке данных с сенсоров в реальном времени, задержки даже в несколько миллисекунд могут привести к серьезным последствиям. Именно поэтому в критически важных системах предпочтение часто отдается языкам с высокой производительностью, таким как C++.
Гибкость и модульность
Роботизированные системы редко остаются неизменными — они постоянно развиваются и модифицируются. Выбранный язык должен позволять легко масштабировать проект и добавлять новые функции. Здесь особенно важна поддержка современных парадигм программирования и возможность создания модульной архитектуры.
Простота изучения и разработки
Этот фактор особенно важен для образовательных проектов и прототипирования. Язык программирования должен позволять быстро создавать работающие прототипы и не требовать глубокого погружения в низкоуровневые детали. Python, например, часто выбирают именно по этой причине.
Экосистема и инструментарий
Современная робототехника немыслима без специализированных фреймворков и библиотек. Критически важна совместимость с ROS (Robot Operating System) и наличие готовых решений для типовых задач. Также необходимо учитывать доступность инструментов отладки и тестирования.
Поддержка AI и ML
С развитием искусственного интеллекта все больше роботов используют алгоритмы машинного обучения для принятия решений. Возможность легкой интеграции с современными AI-фреймворками становится важным критерием выбора языка программирования.
Каждый из этих факторов необходимо оценивать в контексте конкретного проекта. То, что идеально подходит для образовательного робота, может оказаться неприемлемым для промышленной системы, где критична надежность и скорость работы. Поэтому выбор языка программирования должен основываться на тщательном анализе требований к конечному продукту.
Популярные языки программирования для робототехники
Python – универсальный и удобный язык
Python заслуженно занимает особое место, и на это есть веские причины. В первую очередь, этот язык отличается исключительной доступностью для начинающих разработчиков благодаря своему интуитивно понятному синтаксису и обширной документации. Однако было бы ошибкой считать Python исключительно «учебным» языком – его возможности простираются гораздо дальше.
Ключевые преимущества:
- Богатая экосистема библиотек для работы с искусственным интеллектом и машинным обучением (TensorFlow, PyTorch, scikit-learn)
- Превосходная интеграция с ROS (Robot Operating System)
- Широкий выбор инструментов для обработки данных и компьютерного зрения (NumPy, OpenCV)
- Активное сообщество разработчиков и обширная база готовых решений
- Отличная поддержка популярных платформ для прототипирования (Raspberry Pi, Arduino)
Ограничения:
- Относительно низкая производительность для задач реального времени
- Потенциальные проблемы при работе с многопоточностью
- Не подходит для низкоуровневого управления аппаратной частью
В робототехнике Python чаще всего используется для разработки прототипов, создания систем компьютерного зрения и реализации алгоритмов машинного обучения. Особенно эффективен этот язык в проектах, где важна быстрота разработки и возможность легкой модификации кода, например, при создании исследовательских роботов или образовательных платформ.
Стоит отметить, что многие современные роботизированные системы используют Python в связке с более производительными языками, такими как C++, что позволяет получить оптимальный баланс между удобством разработки и эффективностью выполнения критических задач.
C++ – скорость и точность в управлении роботами
C++ традиционно считается одним из ключевых языков в робототехнике, особенно когда речь идет о промышленных системах и задачах, требующих высокой производительности. Этот язык предоставляет разработчикам беспрецедентный уровень контроля над аппаратными ресурсами, что критически важно для создания надежных и эффективных роботизированных систем.
Ключевые преимущества:
- Исключительно высокая производительность кода
- Прямой доступ к аппаратным ресурсам и низкоуровневым функциям
- Эффективное управление памятью и системными ресурсами
- Богатая стандартная библиотека и поддержка современных паттернов программирования
- Тесная интеграция с ROS и другими ключевыми фреймворками робототехники
Ограничения:
- Существенная сложность в освоении, особенно для начинающих
- Более длительный процесс разработки по сравнению с Python
- Повышенные требования к квалификации программиста из-за необходимости ручного управления памятью
C++ особенно эффективен в следующих областях робототехники:
- Управление движением и траекторией робота в реальном времени
- Обработка сенсорных данных с высокой частотой дискретизации
- Создание драйверов для работы с периферийными устройствами
- Разработка систем управления промышленными роботами
Важно отметить, что современный C++ значительно эволюционировал по сравнению с его ранними версиями. Появление умных указателей и других современных функций языка существенно упростило разработку, хотя и не устранило полностью сложность работы с этим инструментом.
Assembly — максимальный контроль над аппаратной частью
После рассмотрения C++ как мощного инструмента для разработки высокопроизводительных систем, стоит обратить внимание на еще более низкоуровневый язык — Assembly. Этот язык программирования представляет собой тонкий слой абстракции над машинным кодом, предоставляя разработчикам практически прямой доступ к аппаратным ресурсам робототехнических систем.
Ключевые преимущества:
- Максимально возможная производительность и эффективность кода
- Прямой контроль над регистрами процессора и периферийными устройствами
- Минимальные накладные расходы при выполнении программы
- Возможность создания предельно компактного кода
- Полный контроль над временными характеристиками выполнения программы
Ограничения:
- Высочайший порог входа и сложность разработки
- Зависимость от конкретной архитектуры процессора
- Отсутствие переносимости между различными платформами
- Сложность поддержки и отладки кода
- Длительный цикл разработки даже для относительно простых задач
В робототехнике Assembly находит применение в следующих областях:
- Программирование микроконтроллеров для критически важных компонентов
- Оптимизация драйверов устройств и обработчиков прерываний
- Работа с специализированными процессорами и DSP
- Создание систем реального времени с жесткими временными требованиями
Важно отметить, что в современной робототехнике Assembly редко используется для написания больших программ целиком. Вместо этого он применяется для оптимизации критических участков кода, где требуется максимальная производительность или точный контроль над временными характеристиками. Типичный подход заключается в комбинировании Assembly с языками более высокого уровня, такими как C++, где Assembly-вставки используются только там, где это действительно необходимо.
Java – кроссплатформенность и гибкость
В мире робототехники Java занимает особую нишу, предлагая баланс между производительностью и удобством разработки. Ключевой принцип «Write once, run anywhere» («Написать однажды, запускать везде») делает этот язык особенно привлекательным для создания кроссплатформенных решений в робототехнике.
Ключевые преимущества:
- Автоматическое управление памятью, снижающее риск утечек
- Отличная поддержка многопоточности и параллельной обработки данных
- Стабильная работа на различных операционных системах и устройствах
- Развитые средства разработки и отладки
- Возможность использования готовых фреймворков для робототехники, таких как leJOS
Ограничения:
- Более низкая производительность по сравнению с C++
- Ограниченные возможности прямого доступа к аппаратному обеспечению
- Зависимость от Java Virtual Machine (JVM)
Java особенно эффективна в проектах, где требуется создание сложной логики управления роботами или разработка систем с распределенной архитектурой. Язык активно используется в образовательной робототехнике, особенно в проектах на базе платформы LEGO Mindstorms, где простота разработки и надежность имеют приоритет над максимальной производительностью.
Стоит отметить, что современные оптимизации JVM значительно улучшили производительность Java, что делает этот язык все более привлекательным выбором для широкого спектра робототехнических проектов.
MATLAB – расчёты и моделирование
MATLAB занимает особое место в робототехнике, выступая как мощный инструмент для моделирования, симуляции и прототипирования роботизированных систем. Этот язык и среда разработки особенно популярны в научных и исследовательских кругах, где требуется сложная математическая обработка данных и визуализация результатов.
Ключевые преимущества:
- Мощные инструменты для математического моделирования и анализа
- Встроенные средства для работы с матрицами и векторами
- Развитые возможности визуализации данных
- Специализированные тулбоксы для робототехники
- Удобная интеграция с системами компьютерного зрения и обработки сигналов
Ограничения:
- Высокая стоимость лицензии
- Относительно низкая производительность для задач реального времени
- Закрытая экосистема
- Сложности при развертывании на встраиваемых системах
MATLAB особенно эффективен в следующих областях:
- Разработка и тестирование алгоритмов управления
- Симуляция кинематики и динамики роботов
- Анализ и обработка данных с сенсоров
- Создание прототипов систем управления
Интересно отметить, что многие разработчики используют MATLAB на этапе прототипирования и отладки алгоритмов, а затем переносят готовые решения на более производительные языки для финальной реализации.
C# – интеграция с Microsoft и .NET
В мире робототехники C# приобретает все большую популярность, особенно в проектах, тесно связанных с экосистемой Microsoft. Этот современный язык программирования предлагает интересный баланс между удобством разработки и производительностью, что делает его привлекательным выбором для определенных задач в робототехнике.
Ключевые преимущества:
- Тесная интеграция с платформой .NET и инструментами Microsoft
- Отличная поддержка разработки в Unity для симуляций и визуализации
- Современный и удобный синтаксис
- Богатая экосистема библиотек и фреймворков
- Эффективные инструменты для создания пользовательских интерфейсов
Ограничения:
- Меньшая распространенность в сообществе робототехники по сравнению с Python или C++
- Ограниченная поддержка в традиционных робототехнических фреймворках
- Сложности при работе с низкоуровневым аппаратным обеспечением
C# находит применение в следующих областях робототехники:
- Разработка симуляторов и систем визуализации
- Создание интерфейсов управления роботами
- Интеграция роботизированных систем с корпоративной инфраструктурой Microsoft
- Разработка приложений для управления роботами на платформе Windows
Стоит отметить растущий интерес к C# в образовательной робототехнике, особенно в проектах, где используется визуальное моделирование и симуляция робототехнических систем.
LISP – для AI и интеллектуальных систем
LISP (List Processing) представляет собой особый случай в робототехнике. Этот язык, будучи одним из старейших языков программирования, сохраняет свою актуальность в определенных нишах, особенно в области искусственного интеллекта и символьных вычислений.
Ключевые преимущества:
- Мощные возможности для обработки символьных данных
- Гибкая система макросов для метапрограммирования
- Эффективная работа со списками и деревьями данных
- Возможность модификации программы во время выполнения
- Исторически сложившаяся база алгоритмов AI
Ограничения:
- Крайне специфический синтаксис, сложный для освоения
- Ограниченное применение в современной промышленной робототехнике
- Небольшое сообщество разработчиков
- Дефицит современных библиотек и инструментов
LISP находит применение преимущественно в исследовательских проектах, связанных с:
- Разработкой систем символьного искусственного интеллекта
- Созданием экспертных систем для роботов
- Экспериментальными проектами в области когнитивной робототехники
Несмотря на ограниченное применение в современной промышленной робототехнике, LISP остается важным инструментом для исследований в области искусственного интеллекта и может предложить уникальные подходы к решению сложных задач в робототехнике.
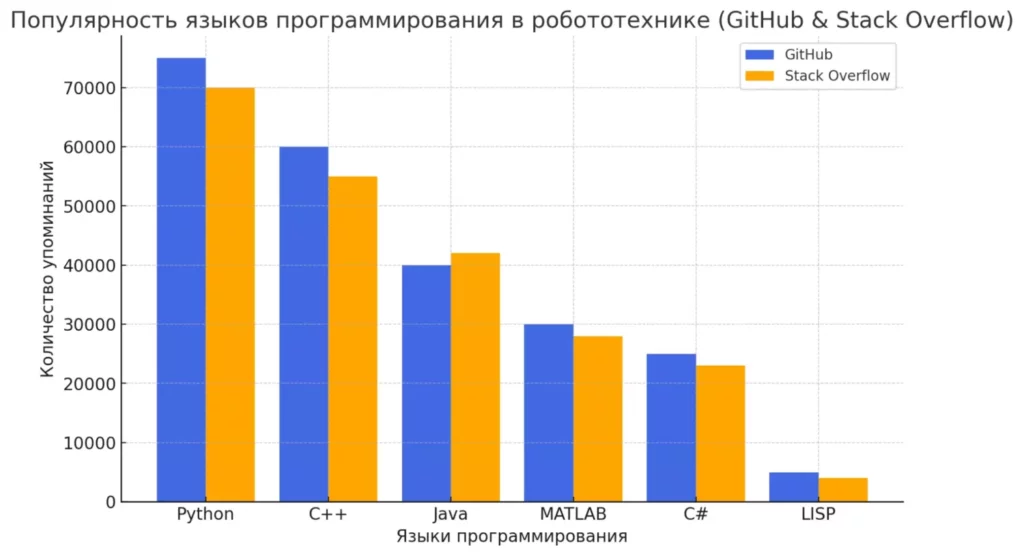
Гистограмма, показывающая популярность языков программирования в робототехнике на основе количества упоминаний на GitHub и Stack Overflow.
Фреймворки и среды разработки для программирования роботов
ROS – ключевой инструмент для робототехники
Robot Operating System (ROS) представляет собой не просто фреймворк, а целую экосистему для разработки программного обеспечения роботов. Несмотря на название, ROS не является операционной системой в традиционном понимании – это метаоперационная система, работающая поверх традиционных ОС, преимущественно Linux.
Ключевые особенности ROS:
- Модульная архитектура, позволяющая создавать сложные системы из простых компонентов
- Богатый набор готовых пакетов для решения типовых задач робототехники
- Поддержка различных языков программирования (прежде всего Python и C++)
- Встроенные инструменты для отладки и визуализации
- Активное сообщество разработчиков и обширная база знаний
ROS особенно эффективен для:
- Разработки систем навигации и картографирования
- Реализации алгоритмов компьютерного зрения
- Создания систем планирования движения
- Интеграции различных компонентов робототехнических систем
Важно отметить, что существует две основные версии ROS: классическая (ROS 1) и современная (ROS 2), которая предлагает улучшенную архитектуру и поддержку промышленных стандартов. При выборе версии необходимо учитывать специфику проекта и требования к надежности системы.
Arduino и Raspberry Pi – для прототипирования и обучения
В мире робототехники Arduino и Raspberry Pi занимают особое место, предоставляя доступную платформу для экспериментов и обучения. Несмотря на относительно скромные технические характеристики, эти платформы открывают широкие возможности для реализации разнообразных робототехнических проектов.
Arduino:
- Простая и интуитивно понятная среда разработки
- Язык программирования на основе C++
- Огромное количество доступных датчиков и модулей расширения
- Идеально подходит для проектов начального уровня
- Низкое энергопотребление и компактность
Raspberry Pi:
- Полноценный мини-компьютер с Linux
- Поддержка различных языков программирования (Python, C++, Java)
- Возможность запуска более сложных алгоритмов, включая компьютерное зрение
- Хорошая интеграция с ROS
- Богатые возможности для сетевого взаимодействия
Типичные области применения:
- Образовательные проекты
- Создание прототипов роботов
- Системы домашней автоматизации
- Экспериментальные разработки
- Хобби-проекты
Важно понимать, что несмотря на ограничения по производительности, эти платформы позволяют отработать основные принципы робототехники и создать функциональные прототипы, которые затем могут быть масштабированы на более мощные системы.
Какой язык выбрать для изучения: рекомендации по применению
При выборе языка программирования для робототехники необходимо исходить из конкретных задач и области применения. Представим сравнительный анализ языков для различных сценариев использования.
Таблица сравнения языков программирования для робототехники:
| Язык | Производительность | Сложность изучения | Основные области применения |
|---|---|---|---|
| Python | Средняя | Низкая | Прототипирование, AI/ML, компьютерное зрение |
| C++ | Высокая | Высокая | Промышленные роботы, системы реального времени |
| Java | Средняя | Средняя | Образовательная робототехника, UI системы |
| MATLAB | Низкая | Средняя | Моделирование, научные исследования |
| C# | Средняя | Средняя | Симуляции, Windows-приложения |
| LISP | Средняя | Высокая | AI-исследования, экспертные системы |
Рекомендации по выбору языка для разных задач:
Для начинающих:
- Python как основной язык
- Arduino IDE (C++) для работы с микроконтроллерами
- ROS как фреймворк для изучения робототехники
Для промышленной робототехники:
- C++ для критически важных компонентов
- Python для вспомогательных инструментов
- ROS 2 для интеграции компонентов
Для исследовательских проектов:
- Python для машинного обучения
- MATLAB для моделирования
- C++ для оптимизации критических участков
Для образовательной робототехники:
- Java (особенно для LEGO Mindstorms)
- Python для общих задач
- Arduino IDE для базового обучения
Важно помнить, что в реальных проектах часто используется комбинация нескольких языков, где каждый решает свои специфические задачи в рамках единой системы.
Примеры кода для работы с роботами
Python: управление движением робота
Рассмотрим простой, но показательный пример использования Python для управления движением робота с использованием ROS:
Этот код демонстрирует базовые принципы работы с ROS и управления движением робота. В примере создается простой контроллер, способный управлять линейным и угловым движением робота через топик /cmd_vel. Код включает обработку ошибок и корректное завершение работы, что критически важно для реальных робототехнических систем.
C++: работа с датчиками
Этот пример демонстрирует работу с лазерным дальномером через ROS. Код включает создание подписчика на топик сканера, обработку получаемых данных и базовую логику определения препятствий. Особое внимание уделено обработке ошибок и проверке валидности данных, что критически важно при работе с реальными сенсорами.
В обоих примерах мы видим практическое применение концепций ROS и особенности работы с разными языками программирования в контексте робототехники.
Заключение
В современном мире робототехника стремительно развивается, предлагая всё новые возможности для инноваций и автоматизации. Выбор правильного языка программирования становится одним из ключевых факторов успеха в разработке робототехнических систем. Как мы увидели в нашем обзоре, каждый язык имеет свои сильные стороны и области применения.
Для тех, кто только начинает свой путь в робототехнике, мы рекомендуем начать с Python – его простота и обширная экосистема библиотек позволят быстро погрузиться в разработку. По мере роста сложности проектов стоит обратить внимание на C++, особенно для задач, требующих высокой производительности. Использование ROS как основного фреймворка значительно упростит разработку и интеграцию различных компонентов.
Важно помнить, что в реальных проектах часто используется комбинация различных языков и инструментов. Способность выбрать правильный инструмент для конкретной задачи – это навык, который приходит с опытом и практикой. Поэтому не стоит ограничивать себя изучением только одного языка или платформы.
Чтобы не тратить время на самостоятельный поиск и сравнение различных образовательных программ, можно воспользоваться специализированными каталогами курсов. Например, на KursHub представлена подборка актуальных курсов по робототехнике, где можно найти программы разного уровня сложности и направленности — от базовых курсов для начинающих до специализированных программ по промышленной робототехнике или программированию автономных систем. Такой подход позволяет быстро сориентироваться в многообразии предложений и выбрать курс, соответствующий вашим целям и текущему уровню подготовки.
Рекомендуем посмотреть курсы по робототехнике для взрослых
| Курс | Школа | Цена | Рассрочка | Длительность | Дата начала | Ссылка на курс |
|---|---|---|---|---|---|---|
|
Факультет инженер умных устройств
|
GeekBrains
68 отзывов
|
Цена
132 498 ₽
264 996 ₽
с промокодом kursy-online15
|
От
4 275 ₽/мес
До 36 месяцев.
|
Длительность
24 месяца
|
Старт
8 мая
|
Робототехника продолжает эволюционировать, и мы видим всё больше инноваций в области искусственного интеллекта, компьютерного зрения и автономных систем. Это открывает новые возможности для разработчиков и делает профессию робототехника одной из самых перспективных в современном мире.

Kata Academy vs SkillFactory: “буткемп” или “классический курс” — что окупается быстрее
Kata Academy vs SkillFactory — что выбрать, если хотите стать Java-разработчиком: интенсивный буткемп с быстрым выходом на рынок или классический курс с гибким графиком? Разбираем оплату, нагрузку, карьерную поддержку и реальные риски перед стартом обучения.
Как выбрать курс, который реально приближает к первой работе
Как выбрать онлайн-курс, который действительно приведёт к работе, а не просто даст доступ к лекциям? На что смотреть в программе, практике и поддержке — разберём по шагам и без лишней теории.

8 лучших ИИ для бухгалтера в 2026 году + готовые промпты
Нейросети для бухгалтера уже помогают быстрее проверять проводки, готовить отчёты и искать актуальные нормы. Какие инструменты стоит попробовать и как использовать их без риска для данных?

Eduson vs SkillFactory: менеджмент/бизнес — где полезнее для быстрого апгрейда в зарплате
Eduson или SkillFactory — что выбрать, если цель — рост дохода и развитие в менеджменте? Разбираем реальные сценарии: где быстрее получить результат, какие курсы подойдут именно вам и на что обратить внимание при выборе.